ロボットのビジュアルフィードバックで高精度・高速動作を実現

『クルーボ』はリアルタイムビジュアルフィードバック制御を用いて、従来は実現困難だった案件を達成する産業用ロボット制御ソフトウェアです 。
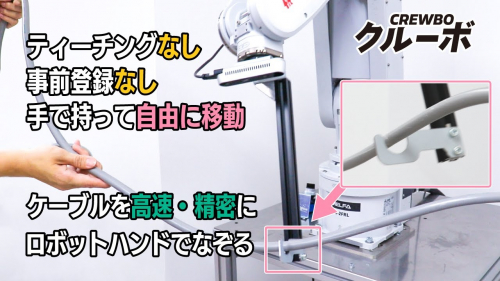
対象物とロボットの手先の相対位置・姿勢情報のみに着目して制御するため、ロボットやカメラの位置を厳密に設定しなくても作業を遂行できます 。
【特徴】
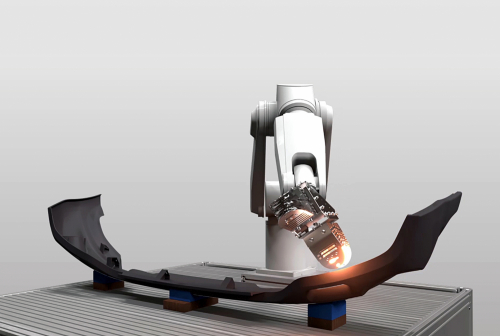
●高精度制御: カメラ画像から手先制御を常時調整することで、手先制御精度0.02mmの高精度制御が可能です 。
これにより力覚センサなしでの挿入作業や、変形・変動する柔軟な対象物のハンドリングも実現します 。
●高速でスムーズな動作: ロボットへの制御指令を自動調整し、軌道をリアルタイムで変更することで、揺れを抑えてタクトタイムを短縮し、ガタツキを低減します 。
●キャリブレーションの負担なし: ロボットとカメラのキャリブレーションが不要で、環境を固定しなくても使用できます 。これにより、AGVや台車に搭載したロボットの高精度な制御も可能です 。