ロボットに人間のような触感を提供する高密度3軸触覚センサー技術
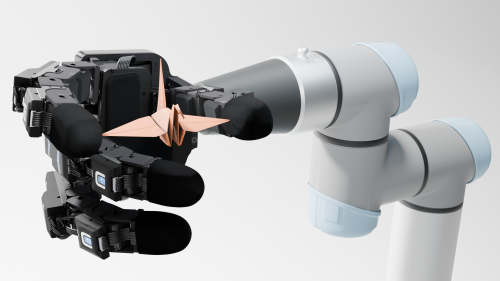


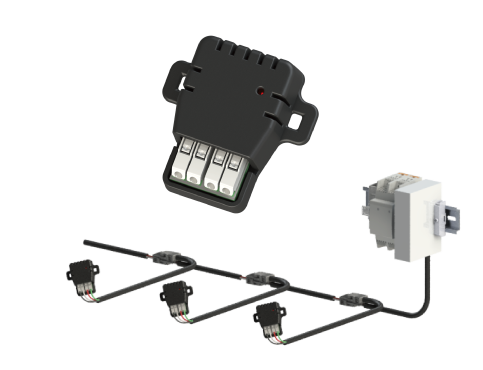
『uSkin』は、薄く、柔らかく、耐久性のあるカバーと最小限の配線で構成されている高密度3軸触覚センサです。
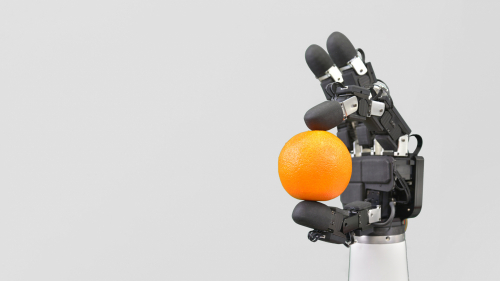
このセンサを使用することで、ロボットは人間のような触覚を持ち、物体を正確に掴んで操作することができるようになります。
すべてのセンサーモジュールは複数のセンサーを搭載しており、各々のセンサーは圧力だけでなく3軸力を測定可能です。
さらにお客様の アプリケーションに合わせてカスタマイズも可能です。
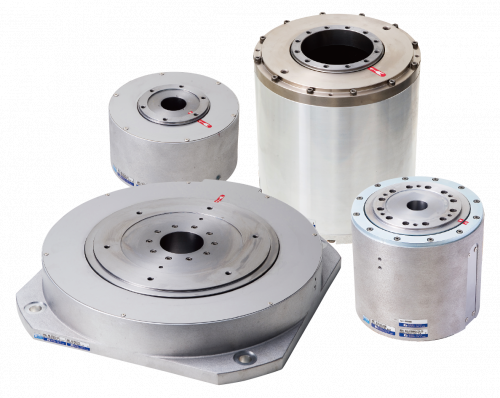
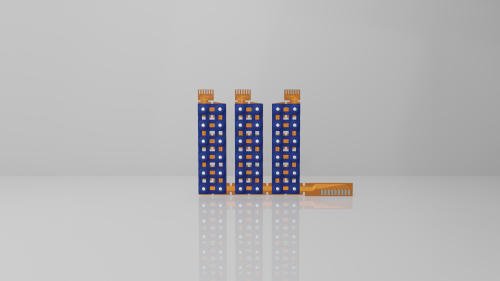
【センサラインアップ】
●パッチセンサモジュール
5つの形状・大きさから成るフラットセンサーシリーズ
●カーブドセンサモジュール
ロボットハンド用湾曲型指先センサーとして特別開発されたモデル
●プロテクトセンサモジュール
グリッパー用に設計された密閉保護タイプ
詳細情報は特設ページよりご覧ください。