模倣学習とデータ収集に特化したエンボディドAI双腕開発プラットフォーム
『エンボディドAI双腕開発プラットフォーム』は、ロボット遠隔操作システム(テレオペレーション・システム)を開発するためのエンボディドAI大規模モデルのためのデータ収集装置です。
模倣学習アルゴリズムに基づき、50回程度のタスクデモンストレーションと静的データの学習によって、タスクの成功率を向上させることが可能です。
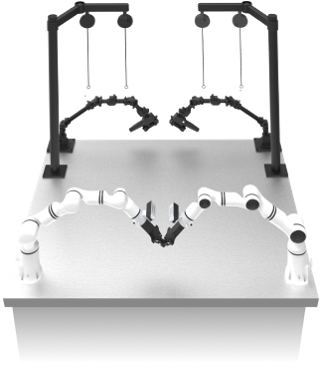
双腕操作用の超軽量マスターアーム、5kg可搬のスレーブアーム、視覚認識用の深度カメラおよびグリッパーが標準構成として統合されています。
C言語やPython、ROSなどの豊富なAPIインターフェースに対応し、関節電流や位置情報の可視化も容易に行えます。
【特徴】
● 模倣学習により50回のデモでタスク成功率を最大90%(理論値)まで向上
● 超軽量マスターアームと5kg可搬スレーブアームによる直感的な操作
● 深度カメラやグリッパーを含む統合設計で設置スペースを節約
【今後期待される活用用途】
● 「ロボットの身代わり操作」を可能にする技術 離れた場所にいる人間が、専用の装置(モーションキャプチャなど)を装着して動くと、その動きをリアルタイムでロボットに伝え、人間と同じようにロボットを動かすことができるシステムです 。
●「熟練の技」を遠隔で再現 人が直接行くのが難しい危険な場所や、遠く離れた現場であっても、オフィスなどの安全な場所から、まるでその場にいるかのように繊細な作業(折り紙を折るような動きなど)をロボットに行わせることができます 。
●「フィジカルAI」との組み合わせ 単なる遠隔操作だけでなく、AI技術(フィジカルAI)と組み合わせることで、より高度で柔軟な動きを実現する次世代の製造・作業支援ツールとして注目されています 。
※補助金対応製品です。活用に関するご相談は「カナデン補助金ヘルプデスク」へ
※ご相談の時期や申請の要件によっては活用ができない場合がありますので、あらかじめご了承ください。