非常に軽量な3Dグラフィックで構築し、モノ・ヒトの流れを計算できるソフトウェア

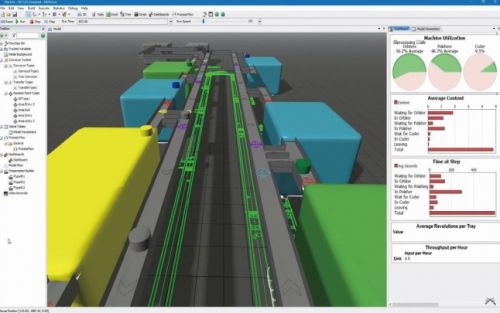
『FlexSim(フレックスシム)』は製造ラインや加工プロセス、物流倉庫、マテハン(マテリアルハンドリング)などのシミュレーションモデルを非常に軽量な3Dグラフィックで構築し、モノ・ヒトの流れを計算できるソフトウェアです。
機械や作業員の稼働率・作業負荷、作業時間など多岐にわたる情報について、グラフを使った一瞥表示も可能です。
これにより工場や倉庫のボトルネックを発見し、性能を最大化するために必要な比較データを瞬時に得ることができ、施設の最適化を支援します。
●簡単で使いやすい
・ドラッグ&ドロップやショートカットキーなどを用いて、シミュレーションモデルの構築が可能
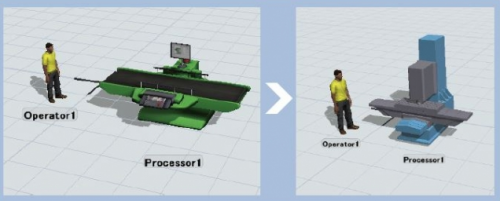
・外部ファイルの取り込みにより、オブジェクトの外観を変更できる
●データが軽く大規模なレイアウトでも計算ができる
・規模が大きな工場や物流倉庫でも、瞬時に繰り返し計算が可能
●結果をグラフ化し、分かりやすく表示
・円グラフ、棒グラフ、ガントチャートなど、各種テンプレートを保有
・シミュレーションの時系列に沿って、グラフを自動更新
・一元表示で容易に比較できる
●ノンプログラミングでプロセスの編集ができる
・プロセスフロー機能により、ピッキング順序や搬送経路、工作機械などのキャパシティを考慮した複雑なプロセスについても、プログラミングすることなく構築可能
・スクリプトの直接編集が可能
●最新のVR(Virtual Reality)技術に対応
・Oculus Rift, HTC Vive といった一般的なVR ヘッドセットに対応
※補助金対応製品です。活用に関するご相談は「カナデン補助金ヘルプデスク」へ
※ご相談の時期や申請の要件によっては活用ができない場合がありますので、あらかじめご了承ください。