視触覚センサ内蔵ロボットハンド カタログ(株式会社FingerVision)
- ロボット関連
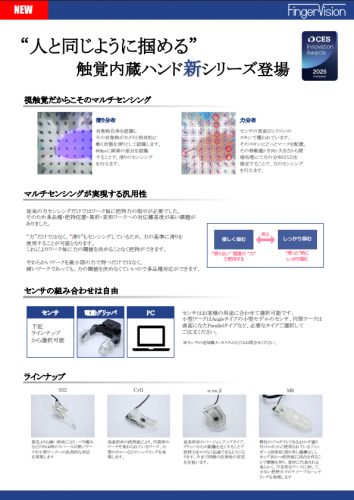
本グリッパセットは、“人間に似た触覚機能”を内臓したFingerVisionブランドのロボットハンド(グリッパ)シリーズです。
画像処理を活用し、“触覚”と“視覚”を共に再現する“視触覚技術”をロボットハンドに導入しました。
センサ表面に加わる力の分布の検知・取得だけでなく、センサ表面から滑り落ちる対象物の滑りも検知・取得が可能です。
これらの機能により、多様な対象物に対して柔軟かつ汎用的な把持を実現します。 従来まで対応不可能であった不定形・柔軟・繊細な対象物(例えば、ハーネス、布、食品など)に対しても、対象物の形状や物性に合わせた把持が可能となります。
さらに、センサとして触覚(力)や視覚(画像)のデータを取得できるため、例えば繰り返し把持動作における力と画像のデータを数値化し、改善に向けた分析が可能です。
それらのデータをAIに学習させ、新たな自動化の取り組みにも活用・応用することもできます。
センサは用途に合わせたさまざま形状をご用意しております。 例えば、センサ表面が広い標準タイプのものから、先端が細いタイプ、曲面タイプ、食品把持に特化したトングタイプなど、必要なタイプを選択可能です。
【特徴】
●人間に似た“触覚”の機能を提供
●“触覚”と“視覚”の機能から、力の検知・取得だけでなく、滑りの検知・取得、その他一般的な画像処理の対応が可能
●Modbus/TCP通信による多様なロボットアームとの接続と連携が可能
【用途・事例】
●不定形・柔軟・繊細な対象物(例えば、ハーネス、布、食品など)の把持
●多品種の対象物に対する汎用的な把持
●繰り返し把持による対象物の物性や把持行為のデータ化およびデータ分析による改善やAI活用への展開



